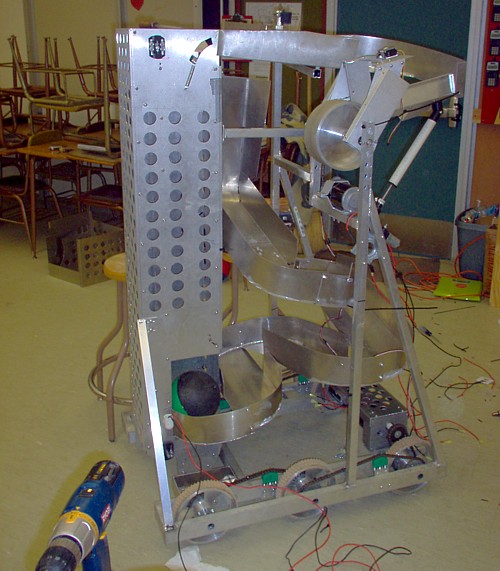
"Penguinbot" no. 1717 nearly done.
DP Engineering Academy /
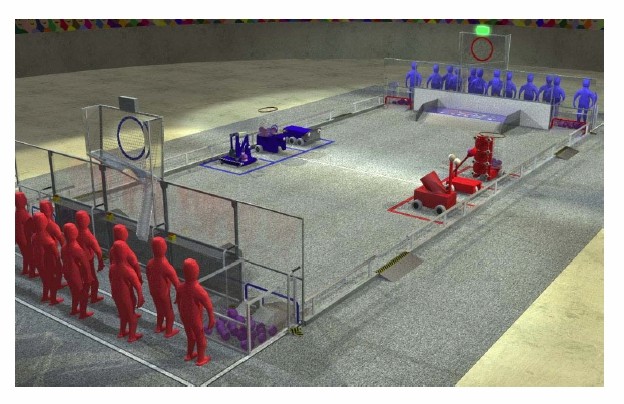
2006 FIRST Robotics Competition:
Construction & Competition Guidelines
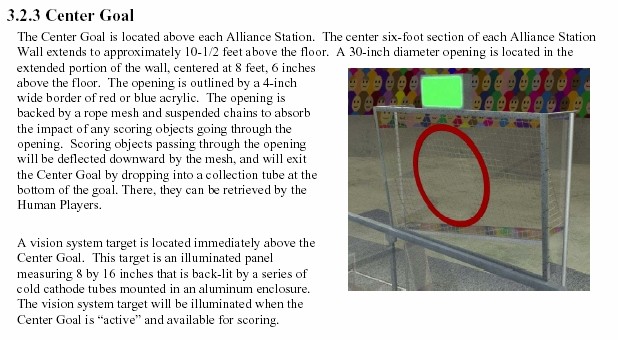
(mock-up
pictures taken from the pdf of the competition regulations)
page created
by H. Marcuse, Feb. 21, 2006;
last updated 3.28/10
- Wikipedia explains FIRST and the 2006 competition
- DP Engineering Academy robotics page; photo page
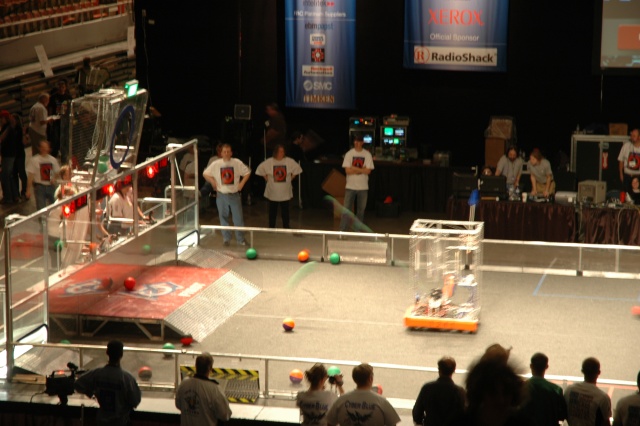
- Atlanta finals Apr. 27-29, 2006: championships homepage.
|
and Phoenix photos |
Los Angeles |
|